快速排序
我们知道冒泡排序、插入排序、选择排序这三种排序算法,它们的时间复杂度都是O(n2),比较高,只适合小规模的排序。归并排序和快速排序,是时间复杂度为O(nlogn)的排序算法,这两种排序算法就比较适合大规模的数据排序,且它们都用到了分治思想。
在实际的工程项目中,快排是最常用到的一种排序算法,所以本文将重点介绍快排。
快排的原理
快速排序算法(Quick Sort),我们习惯性把它简称为“快排”,快排利用的也是分治思想。我们先来看下快排的核心思想。快排的思想是这样的:
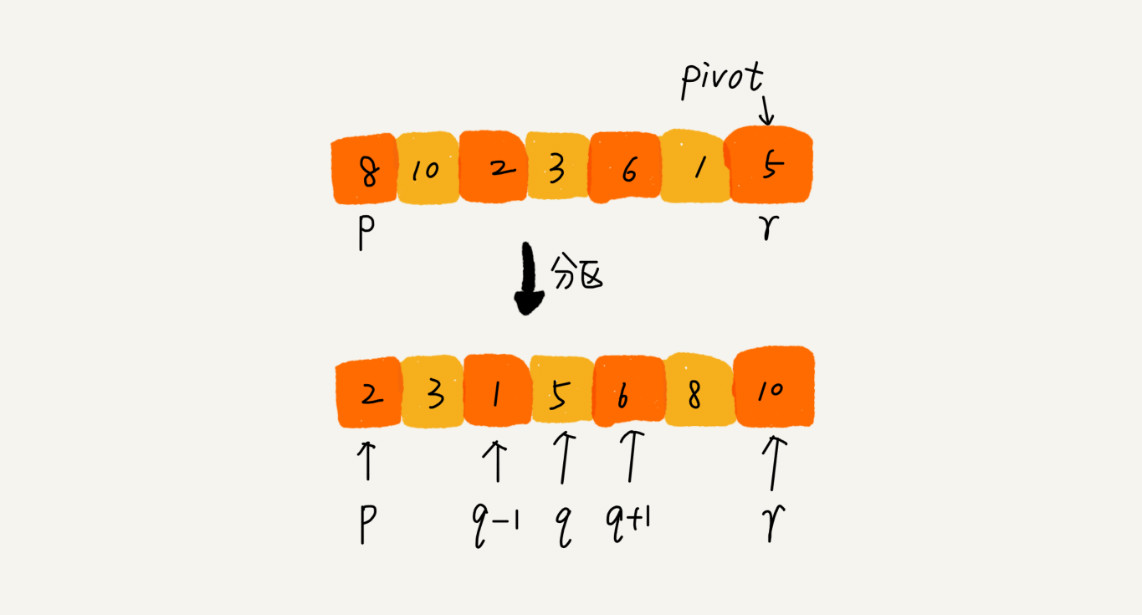
如果要排序数组中下标从 p 到 r 之间的一组数据,我们选择 p 到 r 之间的任意一个数据作为 pivot(分区点)。我们遍历 p 到 r 之间的数据,将小于 pivot 的放到左边,将大于 pivot 的放到右边,将 pivot 放到中间。经过这一步骤之后,数组 p 到 r 之间的数据就被分成了三个部分,前面 p 到 q-1 之间都是小于 pivot 的,中间是 pivot,后面的 q+1 到 r 之间是大于 pivot 的。
根据分治的处理思想,我们可以用递归来排序下标从 p 到 q-1 之间的数据和下标从 q+1 到 r 之间的数据,直到区间缩小为 1,就说明所有的数据都有序了。
可用递推公式来表示上述过程:
递推公式:quick_sort(p…r) = quick_sort(p…q-1) + quick_sort(q+1… r)
终止条件:p >= r
伪代码如下:
// 快速排序,A是数组,n表示数组的大小
quick_sort(A, n) {
quick_sort_c(A, 0, n-1)
}
// 快速排序递归函数,p,r为下标
quick_sort_c(A, p, r) {
if p >= r then return
q = partition(A, p, r) // 获取分区点
quick_sort_c(A, p, q-1)
quick_sort_c(A, q+1, r)
}
partition()是一个分区函数,它的主要功能就是随机选择一个元素作为 pivot 分区点(一般情况下,可以选择 p 到 r 区间的最后一个元素),然后对 A[p…r]分区,函数返回 pivot 的下标。
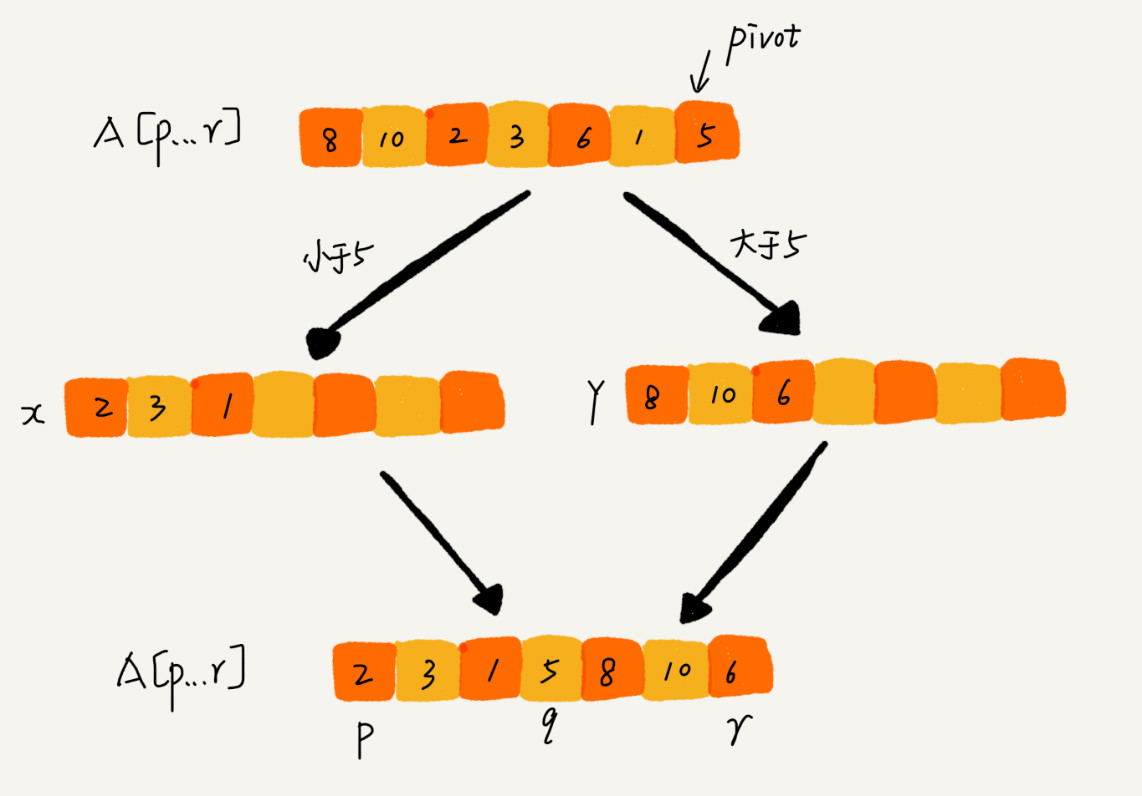
如果我们不考虑空间消耗的话,partition() 分区函数可以写得非常简单。我们申请两个临时数组 X 和 Y,遍历 A[p…r],将小于 pivot 的元素都拷贝到临时数组 X,将大于 pivot 的元素都拷贝到临时数组 Y,最后再将数组 X 和数组 Y 中数据顺序拷贝到 A[p….r]原数组中。
但是,如果按照这种思路实现的话,partition() 函数就需要很多额外的内存空间,所以快排就不是原地排序算法了。如果我们希望快排是原地排序算法,那它的空间复杂度得是 O(1),那 partition() 分区函数就不能占用太多额外的内存空间,我们就需要在 A[p…r]的原地完成分区操作。
原地分区函数的实现思路非常巧妙,伪代码参考如下:
partition(A, p, r) {
pivot := A[r]
i := p
for j := p to r-1 do {
if A[j] < pivot {
swap A[i] with A[j]
i := i+1
}
}
swap A[i] with A[r]
return i
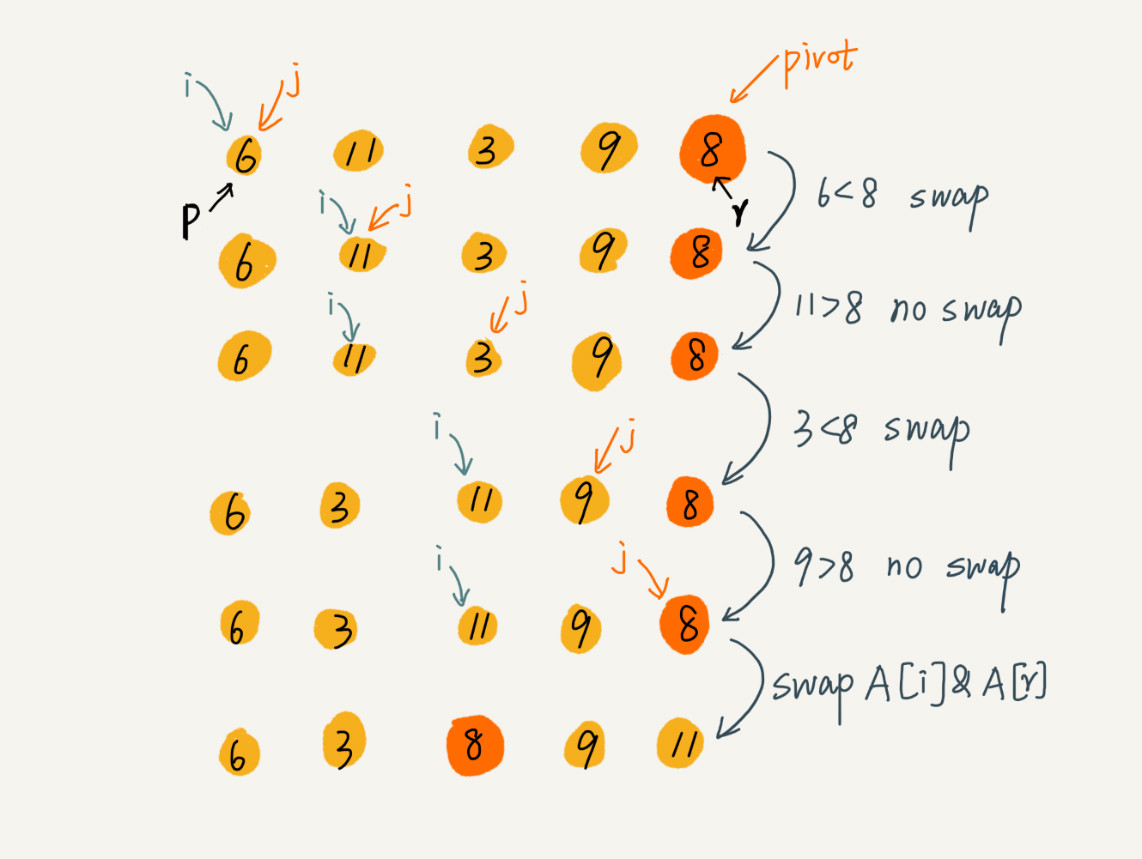
这里的处理有点类似选择排序。我们通过游标 i 把 A[p…r-1]分成两部分。A[p…i-1]的元素都是小于 pivot 的,我们暂且叫它“已处理区间”,A[i…r-1]是“未处理区间”。我们每次都从未处理的区间 A[i…r-1]中取一个元素 A[j],与 pivot 对比,如果小于 pivot,则将其加入到已处理区间的尾部,也就是 A[i]的位置。
类似于数组的插入操作,在数组某个位置插入元素,需要搬移数据,非常耗时。我们会用到一种处理技巧,就是交换,在 O(1) 的时间复杂度内完成插入操作。这里我们也借助这个思想,只需要将 A[i]与 A[j]交换,就可以在 O(1) 时间复杂度内将 A[j]放到下标为 i 的位置。
因为分区的过程涉及交换操作,如果数组中有两个相同的元素,比如序列 6,8,7,6,3,5,9,4,在经过第一次分区操作之后,两个 6 的相对先后顺序就会改变。所以,快速排序并不是一个稳定的排序算法。
快排与归并的区别
快排和归并用的都是分治思想,递推公式和递归代码也非常相似,那它们的区别在哪里呢?
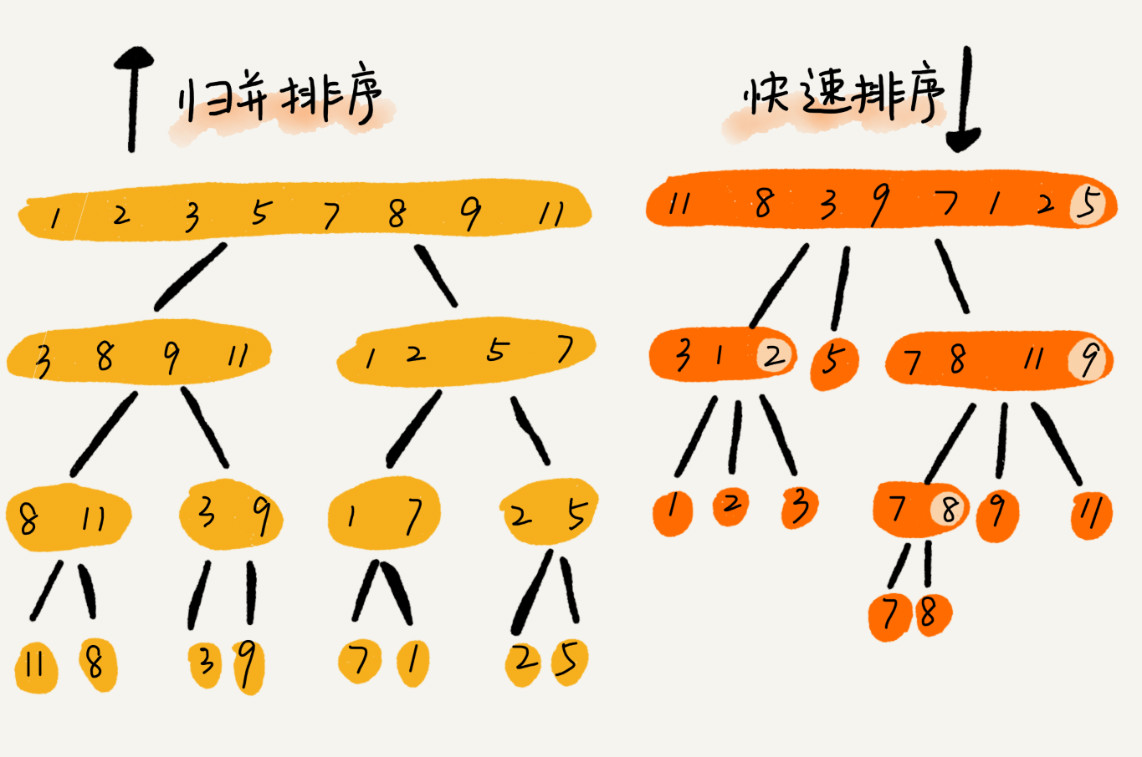
可以发现,归并排序的处理过程是由下到上的,先处理子问题,然后再合并。而快排正好相反,它的处理过程是由上到下的,先分区,然后再处理子问题。归并排序虽然是稳定的、时间复杂度为 O(nlogn) 的排序算法,但是它是非原地排序算法。归并之所以是非原地排序算法,主要原因是合并函数无法在原地执行。快速排序通过设计巧妙的原地分区函数,可以实现原地排序,解决了归并排序占用太多内存的问题。
快排的性能分析
在上文中,已经分析了快排的稳定性和空间复杂度。快排是原地、不稳定的排序算法。
快排也是用递归来实现的。对于递归代码的时间复杂度,如果每次分区操作,都能正好把数组分成大小接近相等的两个小区间,那快排的时间复杂度递推求解公式跟归并是相同的。所以,快排的时间复杂度也是 O(nlogn)。
T(1) = C; n=1时,只需要常量级的执行时间,所以表示为C。
T(n) = 2*T(n/2) + n; n>1
但是,公式成立的前提是每次分区操作,我们选择的 pivot 都很合适,正好能将大区间对等地一分为二。但实际上这种情况是很难实现的。
举一个比较极端的例子。如果数组中的数据原来已经是有序的了,比如 1,3,5,6,8。如果我们每次选择最后一个元素作为 pivot,那每次分区得到的两个区间都是不均等的。我们需要进行大约 n 次分区操作,才能完成快排的整个过程。每次分区我们平均要扫描大约 n/2 个元素,这种情况下,快排的时间复杂度就从 O(nlogn) 退化成了 O(n2)。
刚刚讲了两个极端情况下的时间复杂度,一个是分区极其均衡,一个是分区极其不均衡。它们分别对应快排的最好情况时间复杂度和最坏情况时间复杂度。那快排的平均情况时间复杂度是多少呢?
结论是:快排时间复杂度 T(n) 在大部分情况下的时间复杂度都可以做到 O(nlogn),只有在极端情况下,才会退化到 O(n2)。
思考题—O(n) 时间复杂度内求无序数组中的第 K 大元素
O(n) 时间复杂度内求无序数组中的第 K 大元素?比如,4, 2, 5, 12, 3 这样一组数据,第 3 大元素就是 4。
我们选择数组区间 A[0…n-1]的最后一个元素 A[n-1]作为 pivot,对数组 A[0…n-1]原地分区,这样数组就分成了三部分,A[0…p-1]、A[p]、A[p+1…n-1]。
如果 p+1=K,那 A[p]就是要求解的元素;如果 K>p+1, 说明第 K 大元素出现在 A[p+1…n-1]区间,我们再按照上面的思路递归地在 A[p+1…n-1]这个区间内查找。同理,如果 K<p+1,那我们就在A[0…p-1]区间查找。
第一次分区查找,我们需要对大小为 n 的数组执行分区操作,需要遍历 n 个元素。第二次分区查找,我们只需要对大小为 n/2 的数组执行分区操作,需要遍历 n/2 个元素。依次类推,分区遍历元素的个数分别为、n/2、n/4、n/8、n/16.……直到区间缩小为 1。
如果我们把每次分区遍历的元素个数加起来,就是:n+n/2+n/4+n/8+…+1。这是一个等比数列求和,最后的和等于 2n-1。所以,上述解决思路的时间复杂度就为 O(n)。
堆排序
堆的定义
堆是一种特殊的树,什么样的树才是堆呢?
堆是一个完全二叉树;
堆中每一个节点的值都必须大于等于(或小于等于)其子树中每个节点的值。
分别解释一下这两点。
第一点,堆必须是一个完全二叉树。完全二叉树要求,除了最后一层,其他层的节点个数都是满的,最后一层的节点都靠左排列。
第二点,堆中的每个节点的值必须大于等于(或者小于等于)其子树中每个节点的值。实际上,我们还可以换一种说法,堆中每个节点的值都大于等于(或者小于等于)其左右子节点的值。这两种表述是等价的。
对于每个节点的值都大于等于子树中每个节点值的堆,我们叫做“大顶堆”。对于每个节点的值都小于等于子树中每个节点值的堆,我们叫做“小顶堆”。
堆的实现
要实现一个堆,首先要知道,堆都支持哪些操作以及如何存储一个堆。
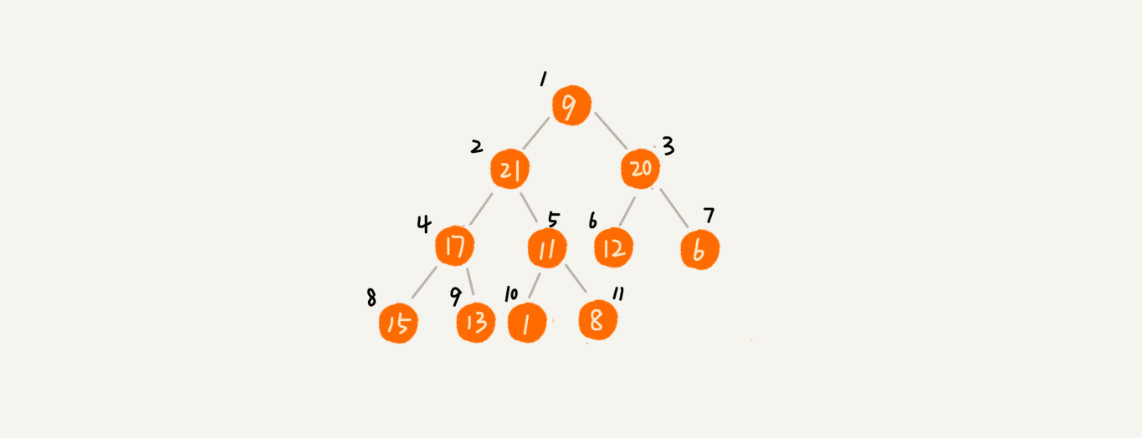
我们知道完全二叉树比较适合用数组来存储,用数组来存储完全二叉树是非常节省存储空间的,因为我们不需要存储左右子节点的指针,单纯地通过数组的下标,就可以找到一个节点的左右子节点和父节点。
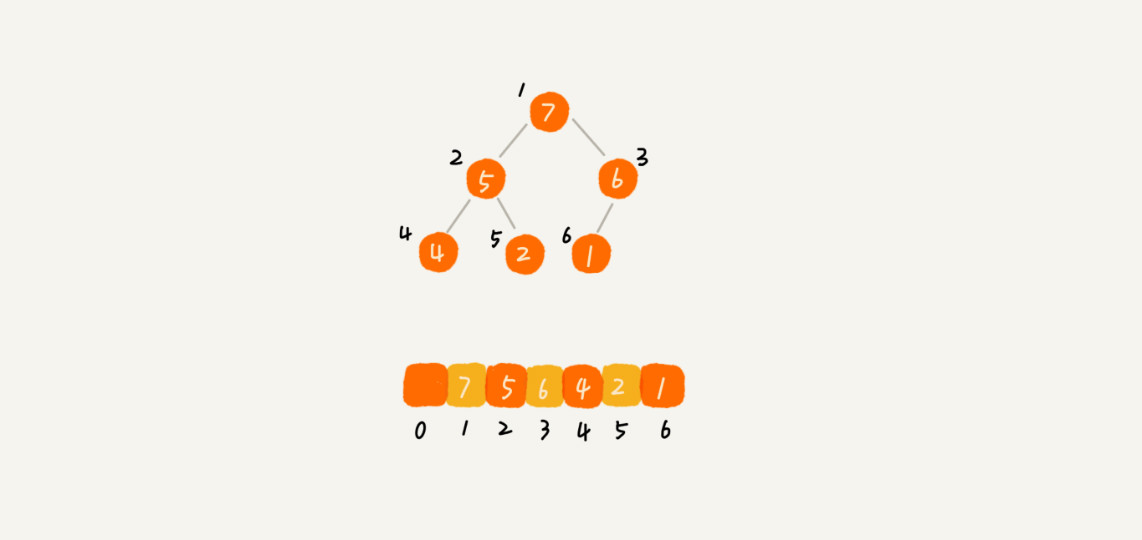
从图中我们可以看到,数组中下标为 i 的节点的左子节点,就是下标为 i∗2 的节点,右子节点就是下标为 i∗2+1 的节点,父节点就是下标为 2/i 的节点。
堆排序
常见的排序算法有时间复杂度是 O(n2) 的冒泡排序、插入排序、选择排序,有时间复杂度是 O(nlogn) 的归并排序、快速排序,还有线性排序。
这里我们借助于堆这种数据结构实现的排序算法,就叫做堆排序。这种排序方法的时间复杂度非常稳定,是 O(nlogn),并且它还是原地排序算法。如此优秀,它是怎么做到的呢?
我们可以把堆排序的过程大致分解成两个大的步骤,建堆和排序。
1. 建堆
我们首先将数组原地建成一个堆。“原地”就是不借助另一个数组,就在原数组上操作。建堆的过程,有两种思路。
第一种是类似在堆中插入一个元素的思路。尽管数组中包含 n 个数据,但是我们可以假设,起初堆中只包含一个数据,就是下标为 1 的数据。然后,我们调用前面堆的插入操作,将下标从 2 到 n 的数据依次插入到堆中。这样我们就将包含 n 个数据的数组,组织成了堆。
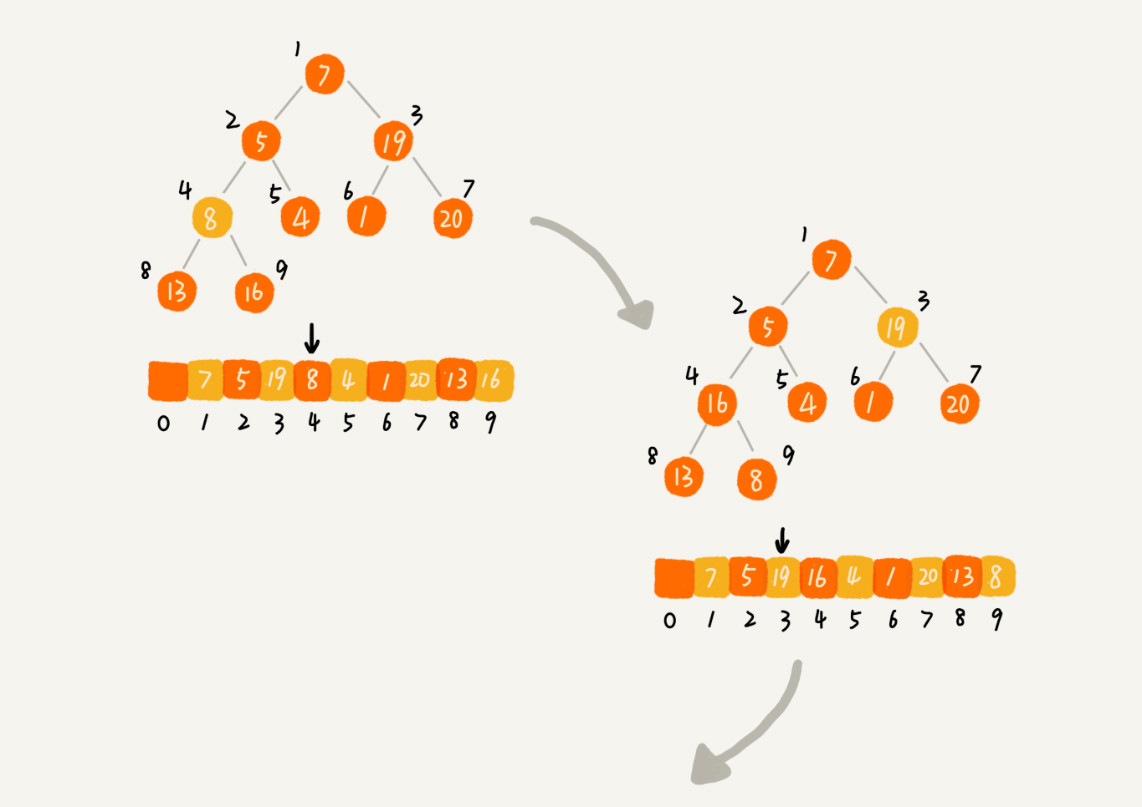
第二种实现思路,跟第一种截然相反。第一种建堆思路的处理过程是从前往后处理数组数据,并且每个数据插入堆中时,都是从下往上堆化。而第二种实现思路,是从后往前处理数组,并且每个数据都是从上往下堆化。
下图是第二种实现思路的建堆分解步骤图。因为叶子节点往下堆化只能自己跟自己比较,所以直接从最后一个非叶子节点开始,依次堆化即可。
实现代码如下:
private static void buildHeap(int[] a, int n) {
for (int i = n/2; i >= 1; --i) { // n/2为第一个非叶子节点
heapify(a, n, i);
}
}
private static void heapify(int[] a, int n, int i) {
while (true) {
int maxPos = i;
if (i*2 <= n && a[i] < a[i*2]) maxPos = i*2; //左子节点更大
if (i*2+1 <= n && a[maxPos] < a[i*2+1]) maxPos = i*2+1; //右子节点更大
if (maxPos == i) break; //本节点最大
swap(a, i, maxPos); //交换父节点与最大子节点位置
i = maxPos;
}
}
注:
- 对下标从 1 开始到 n/2 的数据进行堆化,下标是 n/2+1 到 n 的节点是叶子节点,不需要堆化。对于完全二叉树来说,下标从 n/2+1 到 n 的节点都是叶子节点。
- 建堆操作的时间复杂度就是 O(n)。
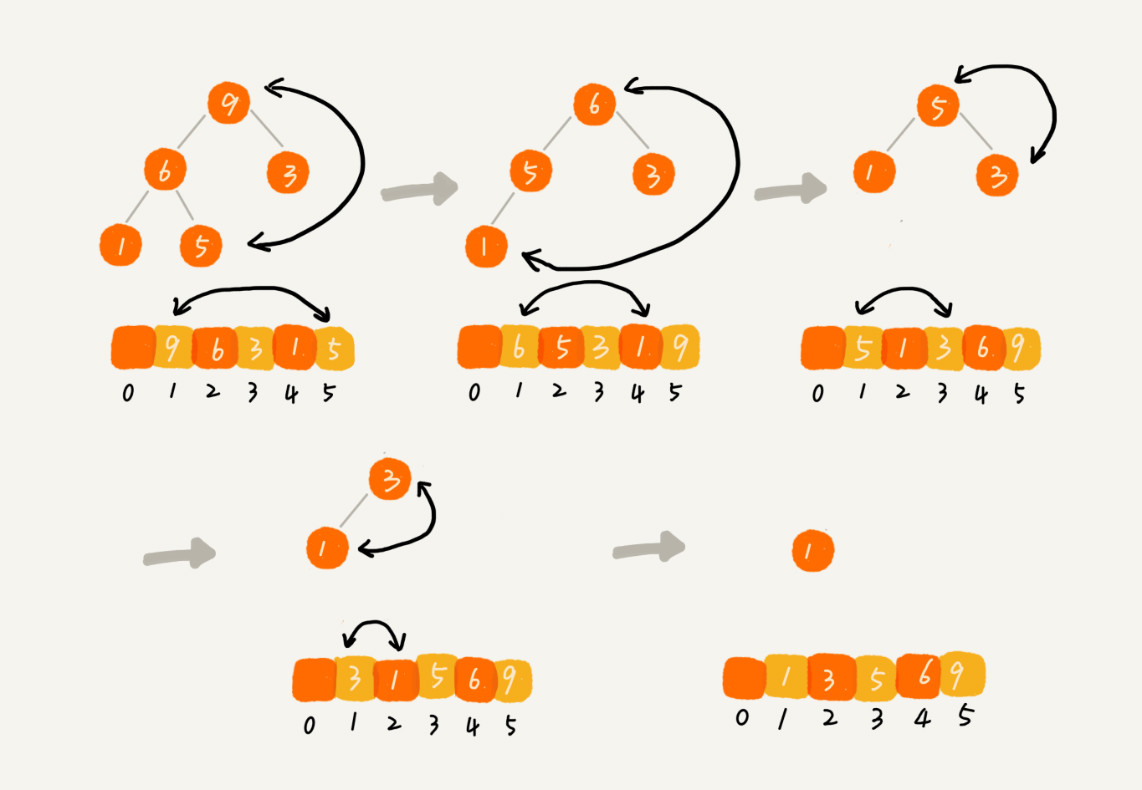
2. 排序
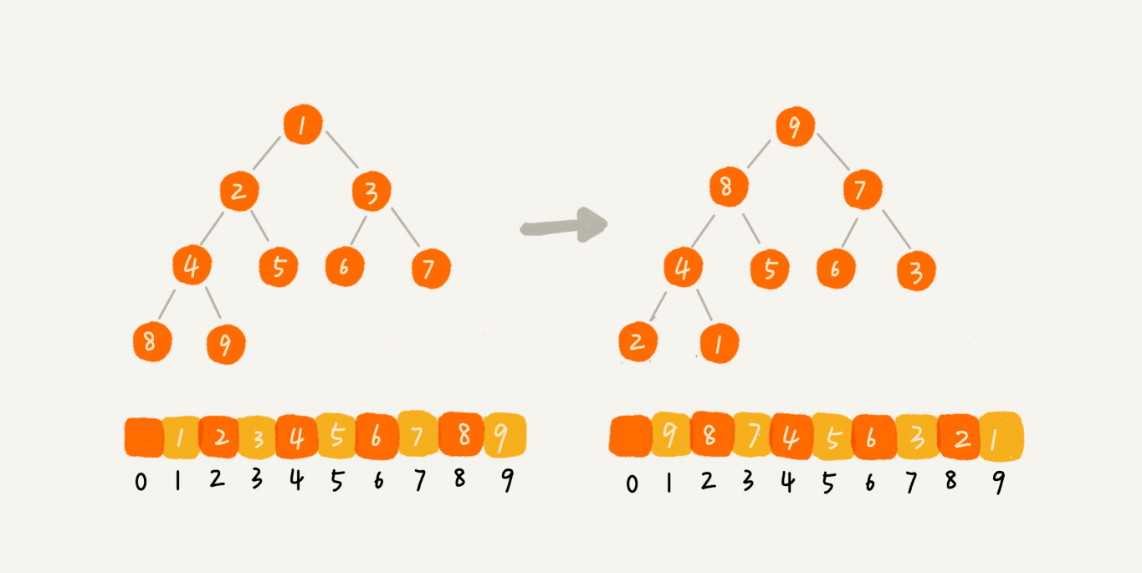
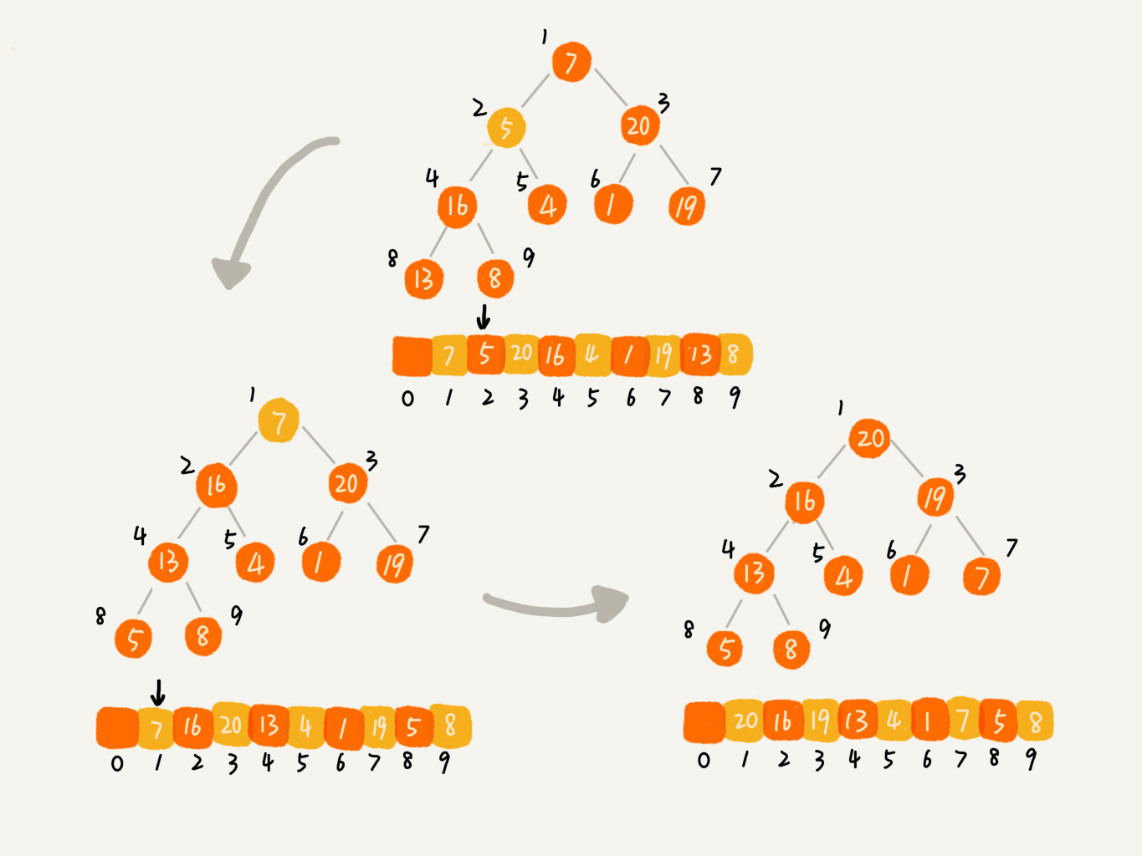
建堆结束之后,数组中的数据已经是按照大顶堆的特性来组织的。数组中的第一个元素就是堆顶,也就是最大的元素。我们把它跟最后一个元素交换,那最大元素就放到了下标为 n 的位置。
这个过程有点类似删除堆顶元素的操作,当堆顶元素移除之后,我们把下标为 n 的元素放到堆顶,然后再通过堆化的方法,将剩下的 n−1 个元素重新构建成堆。堆化完成之后,我们再取堆顶的元素,放到下标是 n−1 的位置,一直重复这个过程,直到最后堆中只剩下标为 1 的一个元素,排序工作就完成了。
实现代码如下
// n表示数据的个数,数组a中的数据从下标1到n的位置。
public static void sort(int[] a, int n) {
buildHeap(a, n);
int k = n;
while (k > 1) {
swap(a, 1, k);
--k;
heapify(a, k, 1);
}
}
整个堆排序的过程,都只需要极个别临时存储空间,所以堆排序是原地排序算法。堆排序包括建堆和排序两个操作,建堆过程的时间复杂度是 O(n),排序过程的时间复杂度是 O(nlogn),所以,堆排序整体的时间复杂度是 O(nlogn)。
堆排序不是稳定的排序算法,因为在排序的过程,存在将堆的最后一个节点跟堆顶节点互换的操作,所以就有可能改变值相同数据的原始相对顺序。
思考题—实际开发中,为什么快速排序要比堆排序性能好?
主要原因有二:
第一点,堆排序数据访问的方式没有快速排序友好。
对于快速排序来说,数据是顺序访问的。而对于堆排序来说,数据是跳着访问的。 比如,堆排序中,最重要的一个操作就是数据的堆化。比如下面这个例子,对堆顶节点进行堆化,会依次访问数组下标是 1,2,4,8 的元素,而不是像快速排序那样,局部顺序访问,所以,这样对 CPU 缓存是不友好的。
第二点,对于同样的数据,在排序过程中,堆排序算法的数据交换次数要多于快速排序。
排序有两个重要概念,有序度和逆序度。对于基于比较的排序算法来说,整个排序过程就是由两个基本的操作组成的,比较和交换(或移动)。快速排序数据交换的次数不会比逆序度多。
但是堆排序的第一步是建堆,建堆的过程会打乱数据原有的相对先后顺序,导致原数据的有序度降低。比如,对于一组已经有序的数据来说,经过建堆之后,数据反而变得更无序了。